Making way for autonomous driving
More comfort, more safety and finally, the driverless car
Up to one third of all new cars sold worldwide will be partially or fully automated by 2025, according to car manufacturers. In addition, road traffic crashes are a major global challenge - so the search is on for ways of improving road safety.
More and more applications are being deployed in cars in order to assist and to increase the comfort of the driver, or even to provide fully automatic driving support. Technological advances now permit proactive safety features such as collision mitigation systems and vulnerable road user detection. The list of features is extensive, and includes: assist functionality such as blind spot detection; lane change assist; rear cross traffic assist; exit assist; rear collision warning; forward collision warning; adaptive cruise control; Assisted Emergency Braking (AEB); front cross traffic assist; parking assist, and pedestrian or bicycle detection.
Work on developing the technology required to provide greater driver assistance and comfort, as well as autonomous driving features, first started some years ago but was only implemented in premium car models. In more recent times, such technology is gradually being introduced into standard models by major car manufacturers.
There has been significant progress in developing the technology that enables driverless cars in certain environments such as for fully automated parking, motorway and city autopilots. However, some key questions still require resolution before additional driver assistance and semi-automated driving can become a reality. This is due to the fact that the precise interaction with the driver needs to be defined. This may often be an even more difficult scenario than automated operations that don’t require interaction with the driver.
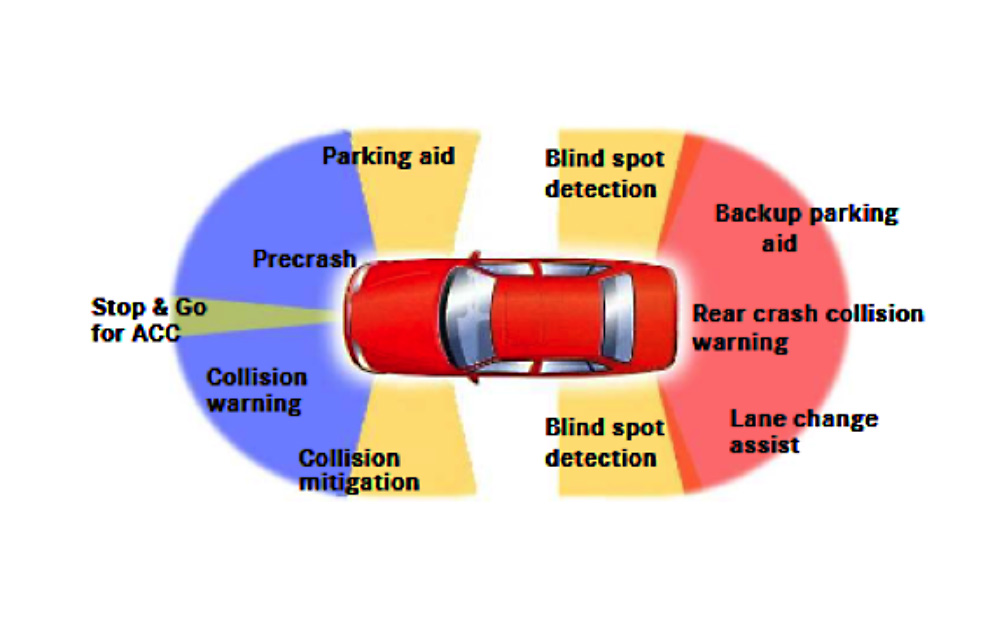 Figure 1: Sensors’ view and supported example applications
Figure 1: Sensors’ view and supported example applications
Sensor platforms
Many cars have now been installed with sensor platforms, which are the enablers for the above applications. A sensor platform may host up to 16 radar sensors (five at the front, two by three at the sides and five at the rear). A large variety of sensors and a redundant sensor layout make sure that obstacles in the car´s surroundings are reliably detected. Optical components also play a crucial role with the use of cameras being most common. Light radars and optical scanners provide viable alternatives. Since optical components can fail in certain situations, an all-optical solution without radars is currently not envisaged by car manufacturers and seen as unlikely in the future (see figure 2 below).
Once radar solutions in cars are available, they will replace other technical solutions such as ultra-sonic sensors. Those ultra-sonic sensors will become obsolete because there is no feature of the sound sensors left which is not covered by all other components of the sensor platforms, for example, for assisted parking where the relatively inexpensive ultra-sonic sensors are widely used today.
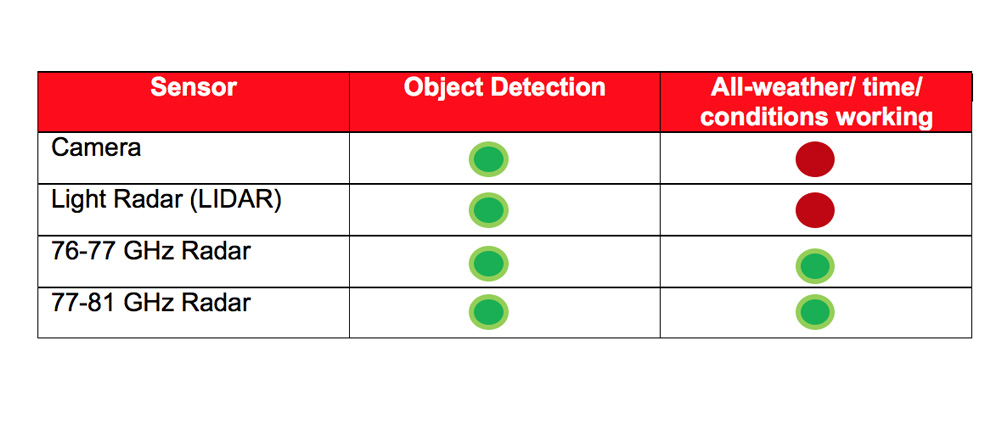 Figure 2: General performance overview of sensor platform components
Figure 2: General performance overview of sensor platform components
More than 22 million radar sensors were placed on the market in 2016 in China alone and the country has determined six regional test areas for automatic driving. Many other countries have similar activities. These testing projects will help to identify changes to the overall regulatory environment, which will be required to support autonomous driving. Some countries such as Germany have already changed their regulatory framework in support of automated driving. The perception that the law is not keeping up with technological advances may ultimately not be true, though it is very challenging as the law typically develops after the technology.
There is greater activity in the development of international market-based standards for the size of sensors, their implementation in cars, testing and conformance to technical requirements. However, national regulations still vary considerably in relation to the details, making, re-testing and re-qualification for individual countries necessary.
There are different types of radar sensors. Some are more forward looking with longer operating ranges of between 100 to 200 metres and with smaller antenna opening angles. Others show a shorter operating range with a bigger opening angle for use around the car. The sensors themselves are connected to the Advanced Driver Assistance System (ADAS) box, as it is most commonly named today. The sensors use synthetic aperture radar (SAR) technology. SAR processing requires significant computing resources to produce the near real-time images needed. Centralised processing of raw sensor data offers several advantages in performance but requires high speed data busses and powerful processors in the car, which present some cost issues. Other designs with regard to centralised versus distributed processing may exist. Radar sensor antennas continue to be a challenge and are an area where there is considerable scope for improvement.
One of the oldest car radar solutions is the 76-77 GHz long range radar which was first implemented for cruise control applications in trucks. Over time, this has become a mandatory application for trucks. Such radars are also used on-board passenger cars, as well as for other applications such as at fixed road surveillance radars, railway level crossing installations, or as anti-collision applications in wing-tips of commercial airplanes or on-board helicopters (ECC Decision (16)01). Within the ECC, studies were recently completed for 76-77 GHz fixed radars versus automotive radars (ECC Report 262) in support of continued and improved spectrum coexistence of fixed and automotive radar applications in the future.
2-phase plan 24/79 GHz
The early introduction of shorter range anti-collision radars in cars has been based on 24/26 GHz technology (ECC Decision (04)10). This regulation was the basis for the worldwide first market introduction of short range radars in a car premium model in 2005 for which the regulatory approach in Europe is time-limited, and the long-term solutions will be based on 79 GHz (ECC Decision (04)03). 79 GHz sensors have now begun to reach the market. While the regulatory approach set out in ECC Decision (04)10 (24/26 GHz short range radars) is time-limited (see figure 3 below), there are some possibilities for narrower bandwidth automotive radars at 24 GHz which provide less resolution accuracy. The regulation for this is set out in ERC Recommendation 70-03 Annex 5.
Following the radar equation, the high bandwidth of 4 GHz and fundamental frequency at 79 GHz will ensure highly reliable radar sensor performance with higher angular and velocity resolution (providing better capability of distinguishing between objects with a range and azimuth resolution of about 3.5 cm). In addition three-dimensional radar is seen as a “must have” in the future as elevation discrimination will also be necessary. The 79 GHz radar sensor implementation in a car has been a challenging aspect over many years. Short range radars have particular importance for the time-critical safety functions, for example pre-crash.
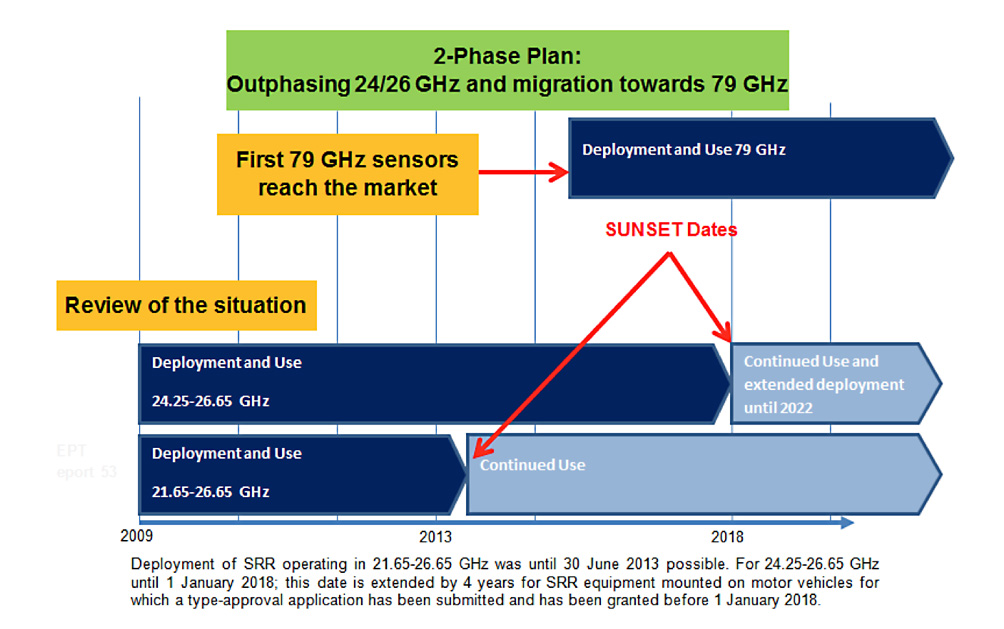 Figure 3: European 2-Phase Plan 24/ 79 GHz
Figure 3: European 2-Phase Plan 24/ 79 GHz
Along with a greater capability for distinguishing between objects, the main advantages of the 77 GHz to 81 GHz frequency range (79 GHz band) are that radar devices can be much smaller, a single technology can be used for all applications, and the risk of mutual interference is lower.
The European spectrum regulation for 79 GHz is in place, and in July 2017, the FCC in the USA expanded the 76-77 GHz band to include the entire 76-81 GHz band for car radars. However, full global implementation is still pending. This aspect is one of the focal points for the automotive industry right now to achieve a truly global implementation. The process of implementation has started in many countries outside Europe, especially after the successful outcome under Agenda item 1.18 at the World Radio Conference in 2015, but sometimes it is subject to national tests and procedures as mandated by the respective national laws before implementation can take place. This introduces some uncertainty about how long national implementation may take in some important jurisdictions outside of Europe.
Future changes
Industry also indicated an interest in a combined regulation for 76-77 GHz and 77-81 GHz, and this may lead to some new spectrum activities in the future. New frequency ranges for sensors above 100 GHz in the automotive field are not discussed at this moment but could of course become a subject as technology continues to evolve.
Another change observed in relation to automotive radar is that the technology is evolving from FMCW ‘chirp’ to OFDM-based solutions. There are concerns amongst the providers that this may raise new intra-automotive radar sensor interference issues due to possible increased noise generation in the sensor’s receiver. It seems clear that solutions for this must be found in the standardisation arena (e.g. standardisation of the waveforms). This does not exclude that the subject in relation to fully automated cars may come to regulators in the future, if the market alone cannot solve this.
Cooperative automotive communications
Cooperate automotive communications such as ITS (Intelligent Transport Systems) can be used to increase the performance of car sensor platforms, either by means of direct vehicle-to-vehicle communications or by communication between the vehicle and the traffic infrastructure, including cellular technologies. Applications can include alert features such as for accidents or icy roads ahead, traffic congestion alerts or vulnerable road user detection.
The ECC regulatory framework is set out in:
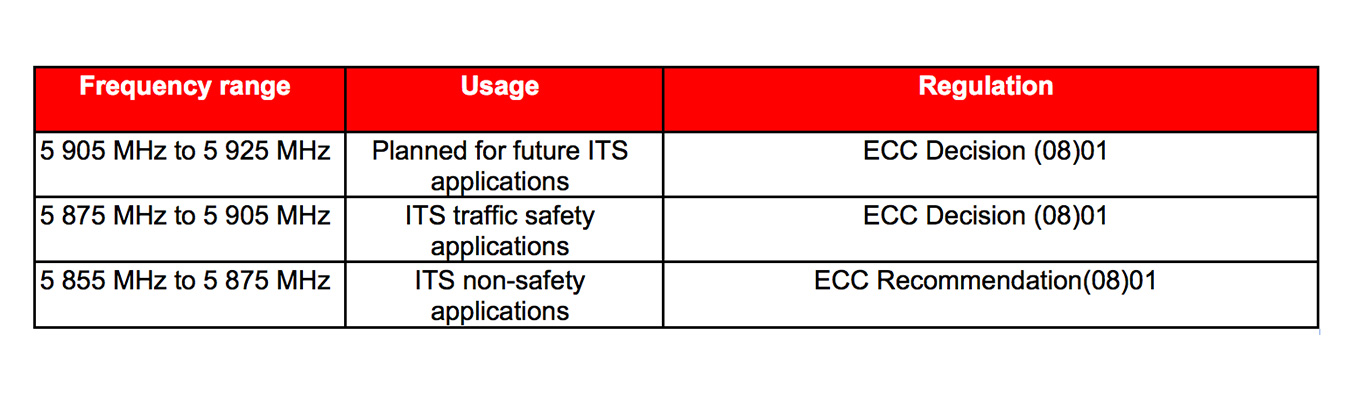 ECC Decision (08)01 and ECC Recommendation (08)01 were amended in 2015. The two harmonisation deliverables were made neutral in order to include all traffic modes and not to be specific to road traffic alone.
ECC Decision (08)01 and ECC Recommendation (08)01 were amended in 2015. The two harmonisation deliverables were made neutral in order to include all traffic modes and not to be specific to road traffic alone.
Ongoing investigations towards a further amendment of ECC Decision (08)01 may see the inclusion of the spectrum up to 5925 MHz for ITS, namely including the spectrum which until now was identified for future ITS usage. The ongoing discussions also take into account Urban Rail Systems (driverless metro systems) for which a request from ETSI was received.
It is expected that the ECC will soon receive a mandate from the European Commission to investigate the extension of the 5.9 GHz ITS regulation in the corresponding EC Decision 2008/671/EC. No application under the umbrella of the ITS regulation should be excluded, and it can be foreseen that the amended EC Decision, as well as ECC Decision, will be technology neutral.
The spectrum access principle for ITS in 5855-5925 MHz is based on shared use of the spectrum. This includes all technologies which are in line with the technical minimum requirements for spectrum access, and includes 3GPP V2V technologies - although all existing compatibility studies in ECC were based on IEEE 802.11/11p/ ETSI G5.
Some stakeholders raised concerns that competing technologies in 5875-5925 MHz could impact on interoperability and utility of this band but no immediate need to take any regulatory action is seen so far in Europe. Apart from that it is important for the regulation to be technology neutral and to enable efficient use of spectrum. Considering which technology is most suitable for traffic safety-related ITS is not a spectrum policy matter.
This means that the technical solution for sharing between different technologies (3GPP V2V, IEEE 802.11/11p/ETSI G5, and also Urban Rail Systems) must be standardised. There is also a need to define, to some extent, how the cellular and automotive industries evolve to support connected cars.
Another band: 63-64 GHz
ECC Decision (09)01, which was amended in 2016, should also be mentioned here in the context of sensor platforms. The 63-64 GHz band provides possibilities to exchange a large amount of raw sensor data at a short distance, which is essential for life-threatening situations, as well as time-extending aspects like closer distance driving with cooperative adaptive cruise control (C-ACC) and truck platooning. These may require both the 5.9 GHz and 63-64 GHz bands to achieve a reasonable level of performance with sufficient system redundancy. In the 1990s, C-ITS research showed that the 63 GHz band has benefits for cooperative applications, but due to the lack of feasible semiconductor technologies, systems have not been implemented for specific use in this band. In this respect, there are thoughts that ITS in this frequency range could benefit from the WiGig (Wireless Gigabit) ecosystem and align with the WiGig channelisation. Another idea would be to use the 76-81 GHz for cooperative applications and not only for sensors, in order to use part of the radio components (including antenna) which are used for sensors. Research projects at a European level are encouraging stakeholders to further elaborate the solutions for cooperative applications in this frequency range.
Thomas Weber, Spectrum Expert, European Communications Office
